
Dator till sjöss
18 okt 2019
Processtyrning av fartyg (SSF Project 5401)
För 50 år sedan, 1969, installerades den första ”processdatamaskinen” i ett handelsfartyg.
Högertrafik hade då införts för två år sedan och de bilar som dominerade gatubilden var Saab 93, Volvo PV, Volvo Amazon och VW. Steve Jobs och Bill Gates var i Junior Highscool och marknaden för större datorer dominerades av IBM.
Ledande i Sverige inom utveckling och produktion av datamaskiner, eller räknemaskiner som de ibland benämndes, var ett relativt nystartat bolag i Linköping; Datasaab. Saabs huvudintresse för räknemaskiner låg då på den militära sidan. Det gällde utveckling av avancerade robotar men kanske framför allt Flygplan 37 Viggen.
Som vanligt med nya innovativa produkter gäller det att skapa efterfrågan och under 60-talet började det röra på sig inom bank- och försäkringsbranschen samt hos våra länsstyrelser som börjat drömma om centraliserad folkbokföring. Kockums var också pådrivande med tanke på t.ex. avancerade hållfasthetsberäkningar.

Datasaab utvecklade sin första transistoriserade maskin, D 21, som var leveransklar i slutet av 1962. Alla systemprogramvaror hade utvecklats från grunden och man utvecklade t.o.m. ett eget användarprogram, Algol-Genius, som blev en stor succé. I landstingets upphandling slog man ut IBM och deras dator IBM 360.
ASEA satsade på processreglering och skapade samarbeten med amerikanska datorleverantörer varav en var Control Data Corporation i Californien.
I denna miljö väcktes tanken att av forskningsskäl starta ett maritimt projekt. Stiftelsen Svensk Skeppsforskning under ledning av Direktör Bengt Wallin tog på sig ansvaret att finansiera och driva projektet och ett svenskt tankfartyg beställt av Salénrederierna AB för leverans av Kockums Mekaniska Verkstad i Malmö sågs som en lämplig plattform. Dettta omfattande forskningsprogram blev begynnelsen till utvecklingen av den teknik som under de följande fem-tio åren i rask takt implementerades i moderna fartyg.
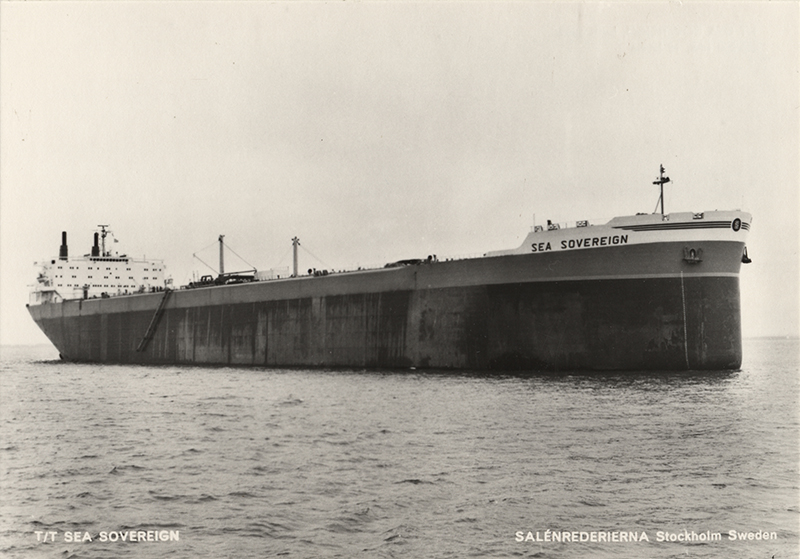
Nb 518, T/T ”Sea Sovereign”, lämnade Kockums för sin första resa den 21a oktober 1969 för att ta en last om drygt 200 000 ton råolja från persiska viken till Kagoshima i Japan dit hon anlände på nyårsafton 1969. Där mötte ett stort pressuppbåd samt sedvanlig generöst japanskt välkomnande.
I utbildningssyfte hade Saléns dubblerat seniorbesättningen med råge och dessutom var vi sex ingenjörer ombord under ledning av civilingenjör Jerk Oldenburg som redan från början varit huvudman i projektet.
Dessutom hade vi från Saléns sida välkomnat Televerket att installera en prototyp av vad som senare blev Maritex – världens första automatiska telex, som inte helt utan konflikter användes till att sända hem maskindata.
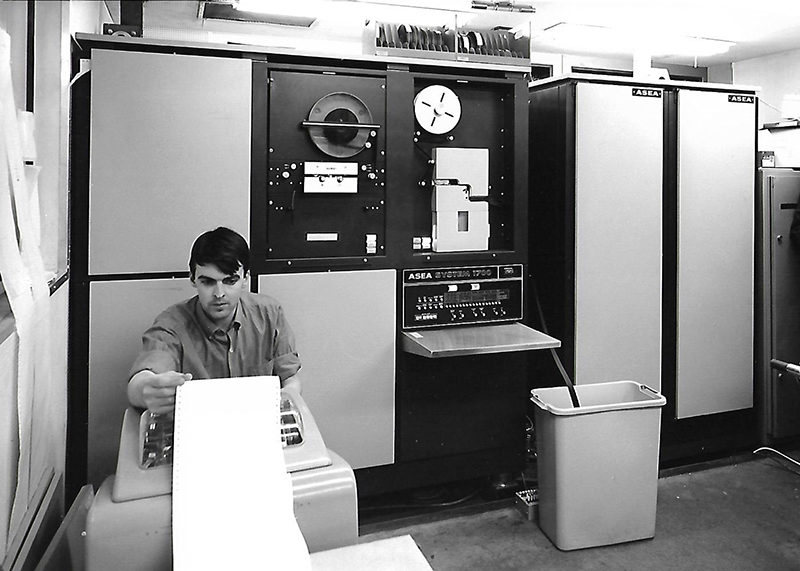
Datamaskinen kom från Control Data Corporation i USA, vars svenska representant var dåvarande ASEA (ABB) som levererade och stod för maskinvaran, support med mera. Maskinen, som gick under namnet ASEA 1700 och senare döptes om till POMPE, var en c:a 8 m3 stor pjäs som vi installerat i fartygets kontrollrum upphängd på vibrationsdämpare. För att i möjligaste mån skydda den från eventuella störningar på fartygets elnät försörjdes den via en roterande omformare om 3,6 kW.
För lagring av data och utförande av program var maskinen utrustad med tre stycken kärnminnesmoduler om vardera 16 kb. 48 kb var inte så mycket ens på den tiden, så programmeringen utvecklades i en ”maskinnära” kod som ställde stora krav på programmerarna som dessutom måste införskaffa kvalificerad processkunskap.
Med den ambition som inrymdes i projektet räckte inte minnesutrymmet till för att hantera alla teknikområden som planerats, vilket resulterade i att tre separata program utvecklades:
- Navigering och styrning av fartyget
- Automation av turbinmaskineriet och dess styrning från bryggan
- Styrning av lasthanteringsprocessen, d v s lastning och lossning av fartyget.
De tre programvarorna låg på rullar med hålremsor som laddades in via en ”remsläsare” vilket kunde ta sin tid. Om något gick fel var det bara att börja om igen.
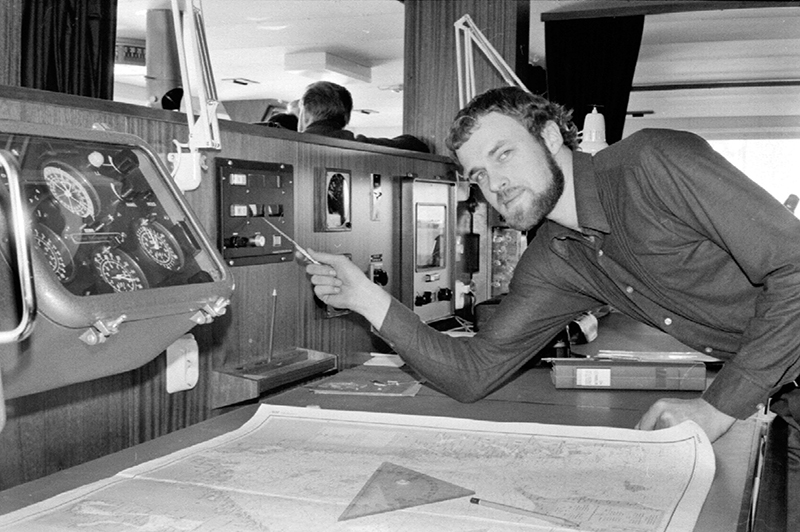
En första generationens satellitmottagare hade införskaffats från Magnavox. Den levererade en noggrann position, men i bästa fall endast var 90:e minut. Signalerna som mottagaren bearbetade kom från ett mindre antal satelliter som hade en omloppstid om cirka 90 minuter. Mellan de noggranna positioner som togs emot genomförde datamaskinen en dödräkning som gav position kontinuerligt. I denna process ingick även storcirkelnavigering, det vill säga kontinuerlig uppdatering av rätt kurs för att nå fartygets nästa vägpunkt med hänsyn tagen till jordens krökning.

I programmet låg även en autopilot som hade funktioner som ingen testat tidigare. Den var utrustad med ett gyro som med hög känslighet kände av hastighet och acceleration i ett mindre avvikande från avsedd kurs och därför kunde korrigera snabbt med små roderutslag. Tankfartygen hade med åren kommit att öka i storlek. En bit över 100 000 dwt tenderade de att bli ostabila, varvid konventionella autopiloter fick svårt att åstadkomma en stabil kurs med alltför stora roderutslag som följd.
Autopiloten tog dessutom emot den kontinuerligt beräknade storcirkelkursen. Detta resulterade i en betydande tidsvinst som i påföljande fartygsserie kunde omsättas i ekonomisk vinst.
Att ändra kurs på ett fullastat tankfartyg när man i öppen sjö nått en vägpunkt kunde sakta ner farten. Genom en automatiskt kontrollerad kursändring, som t.ex genomfördes utifrån en förinställd vändradie, kunde tid och pengar sparas. Denna funktion förfinades efterhand och uppnådde goda resultat.
Av en rorsman som ska styra ett stort tankfartyg på relativt grunt vatten krävs känsla och erfarenhet. Men om datamaskinen kunde beräkna och förutsäga resultatet av ett givet roderutslag och presentera detta på en skärm skulle ju mycket vara vunnet, var vår tanke. Tyvärr visade det sig att det saknades både minneskapacitet och processorhastighet för att utföra de beräkningar som krävdes, så detta delprojekt kunde inte avslutas. (Några år senare, i ett helt annat Salén-projekt, insåg vi att en sådan förutbestämmelse är helt beroende av bl.a fartygets djupgående).
Det dröjde cirka tio år innan Silja Lines Kapten Karo kunde visa upp något liknande. Ett mycket intelligent styrsystem som för övrigt var utvecklat och installerat av ett företag som sprungit ur Kockums.
För styrning av turbinmaskineriets ångcykel hade Kockums utvecklat ett förnämligt och för den tiden helt unikt elektroniskt reglersystem. Systemet som levde vidare under många år hade för vårt projekt försetts med funktioner som gjorde det möjligt att koppla om en reglerfunktion i sänder till ”datamaskindrift”. Det var en stor upplevelse att se när ”datamaskinen” så småningom styrde hela ångcykeln.
Turbinmaskineriet styrdes, som i de flesta turbinfartyg på den tiden, från bryggan med hjälp av ett system utvecklat av ASEA. Systemet kontrollerade två manöverventiler, en för huvudturbinerna och en för backturbinen. För vårt projekt arrangerades omkoppling mellan ASEA och ”datamaskindrift” på ett liknande sätt som för systemet som styrde ångcykeln.
När vi lyckats med att köra flera dygn med obemannat maskinrum var detta delprojekt i stort sett avslutat.
Den tredje programvaran var avsedd att styra lastning och lossning av fartyget. Lastkontrollsystemet och den teknik som detta byggde på hade kanske inte ägnats så stor uppmärksamhet i Salénfartygen tidigare, och tekniken var tämligen konventionell. Det visade sig till exempel bli ganska problematiskt att avläsa ventillägen på ett tillförlitligt sätt.
I projektet ingick:
- styrning av lastolje- och ballastpumpar med belastning under varierande flöden
- automatisk förinställning av ventiler för ett antal lastnings- och lossningssekvenser
- övervakning och kontroll av fartygets hållfasthet (böjmoment och skärkrafter) under lasthantering
Automatisk lasthantering blev ingen succé. Däremot är det som vi benämnde ”Loadmaster Online”, det vill säga ett lastfördelningsinstrument kopplat till systemet som mäter alla tanknivåer och som kontinuerligt beräknar och presenterar vad fartyget utsätts för hållfasthetsmässigt, nu standard i de flesta fartyg sedan lång tid.
Stal Laval, som på den tiden var ett dotterbolag till ASEA (nuvarade ABB), hade utvecklat ett ångturbinmaskineri (typ AP) som lämpade sig synnerligen väl för tankfartyg som under 60-talet blivit allt större och närmade sig 200 000 tdw i lastförmåga. AP-maskineriet var något av en revolution på området eftersom det var konstruerat för automatisk reglering av ångcykeln. Dessutom hade AP-maskineriet försetts med två speciella pilotventilassisterade manöverventiler förberedda för kontroll av maskineriet från bryggan.
Med dåtidens pneumatik nådde man ner till en bränsleförbrukning under 210g/Hkh vilket var långt under vad konkurrenterna kunde klara.
ASEA, som förekommit i den marina miljön under åratal och nu var ifärd med att utveckla elektroniklösningar för marina tillämpningar, utvecklade på uppmaning av Kockums ett styrsystem som med hjälp av Stal Lavals förnämliga manöverventiler gjorde det möjligt att manövrera maskineriet från bryggan.
Detta utgjorde ett stort steg framåt i utvecklingen mot att operera fartyg utan vaktgång i maskinrummet. Ångcykeln reglerades med hjälp av pneumatisk reglerteknik från Honeywell, men ångpannorna som försörjde maskinrummet med överhettad ånga vid 61 Bar och 510 C krävde också relativt avancerad reglerteknik. Sådana system fanns inte på den tiden, så Kockums med Jerk Oldenburg i spetsen utvecklade de system vi behövde. Detta blev början till ett samarbete mellan Salénrederierna och Kockums som resulterade i ett flertal system som gjorde det möjligt att med framgång operera turbinfartyg säkert och effektivt.
Salénrederierna AB beställde fyra stora tankfartyg för leverans från Kockums under 1966–67. Dessa fartyg visade sig bli synnerligen lyckosamma och därefter beställdes SEA SOVEREIGN, ett nytt rekord i storlek, drygt 210 000 tdw med en framdrivningseffekt om 30,000 Hk.
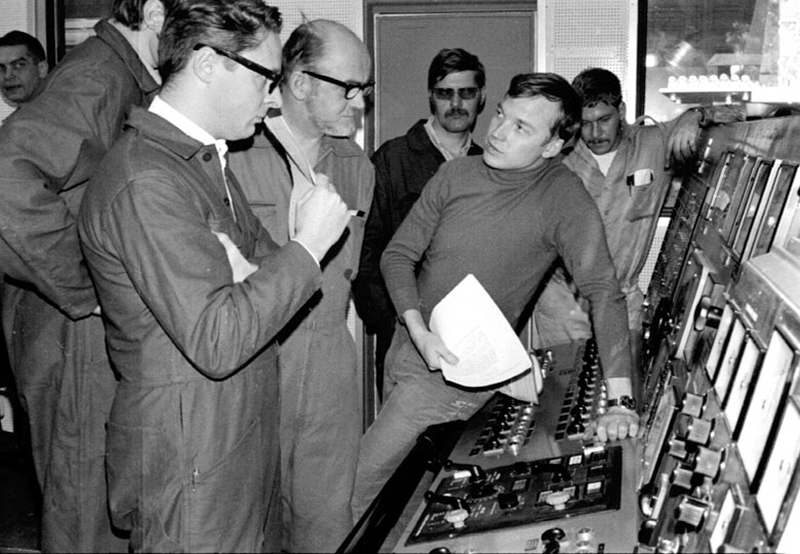
Alla som jobbade med elektronik och processtyrning på den tiden var unga, rentav mycket unga. Tekniken och framför allt datatekniken var ju ny och automationens inträde i processindustrin hade nyligen inträffat. Att introducera ny teknik som denna i den konservativa marina miljön gick trögt för många men genom samarbetet med Kockums blev Salénrederierna en vinnare.
Drift med obemannat maskinrum började diskuteras under mitten av 1960-talet. Bättre levnadsstandard ombord, säkrare övervakning av maskineriet och bättre möjligheter att planera underhåll ombord intresserade de skandinaviska redarna. Våra norska vänner hade ett försprång eftersom deras klassificeringssällskap DNV engagerade sig i frågan på ett tidigt stadium.
Drift med obemannat maskinrum krävde givetvis nya regelverk och där låg Sverige efter. Salénrederierna hade alla sina fartyg i Lloyd’s Register och dessutom hade vi Sjöfartsverket som nog var bra på mycket. Men ”obemannat maskinrum”?
Saléns tekniska avdelning kom att jobba intensivt med både Lloyd’s och Sjöfartsverket i att utveckla regelverk och alla de fyra tankfartygen som levererades före 1967 blev certifierade för ”Unattended Machinery Spaces”, UMS, efter en tids drift.
Sea Sovereign kom att opereras med obemannat maskinrum tre dagar efter att hon lämnat varvet med automation godkänd för UMS.
Projektet redovisades i en huvudrapport som kom ut 1970. I tillägg utkom sex delrapporter unden påföljande år.
Huvudrapporten distribuerades till svenska rederier och varv samt till andra intressenter i Stiftelsen Svensk Skeppsforskning.
Intresset var mycket svalt eftersom inte så många förstod forskningsincitamentet utan trodde att den dator som installerades uttryckte hur vi såg framtiden. ”Vem som helst kunde väl förstå att sådana maskiner inte hörde hemma i fartyg”, etc.
Internationellt var det egentligen bara våra norska grannar som förstod vad detta handlade om och som insåg att en ökad användning av automatik med inblandning av datorteknik utgjorde ett viktigt element i en pågående utveckling inom sjöfarten. Kanske var inte så många rederier intresserade ännu, men där fanns en drivkraft i form av bland andra Det Norske Veritas.
Svenska varv och redare tog emot rapporterna med svalt intresse. För varvens del berodde detta sannolikt på bristande förståelse bland de internationella kunderna.
Under 1971 beslutade Investor att starta ett bolag med säte i Västerås vars uppgift skulle vara att integrera ASEA och LM Ericssons verksamheter inom datorteknik. Bolaget fick namnet ASEA LME Automation och en ung och framstående VD tillsattes, som organiserade bolaget i avdelningar med specialisering inom olika industriella områden varav ”Marin” blev ett.
Inom den marina avdelningen utvecklades ett flertal datorbaserade koncept men avsaknaden av intresserade kunder gjorde att inga större system kom att levereras. Efter att mikrodatortekniken slagit igenom utvecklades nya elektroniksystem baserade på ny teknik. Förnämliga operatörsstationer med grafiska gränssnitt utvecklades och den marina organisationen flyttades till Italien för att så småningom landa i Finland.
Inom ramen för samarbetet mellan Kockums och Salenrederierna accelererades emellertid satsningar på automatiserad processtyrning kraftigt under de följande åren och redan under 1971–72 levererades ytterligare fyra tankfartyg. Dessa låg på 256 000 tdw vardera. I dessa fartyg installerades en datamaskin som motsvarade militära krav utvecklad av norska Kongsberg. Ett speciellt rent och välventilerat utrymme byggdes på navigationsdäck bakom bryggan.
Denna dator kom att utföra:
- manövrering av turbinmaskineriet från bryggan
- automatisk styrning av fartygets kurs med setpoint beräknad av navigationssystemet
- automatisk kursändring i syfte att inte förlora i hastighet
- automatisk positionsbestämning med dödräkning
- storcirkelnavigering
- ”Loadmaster on-line”
För samma fartygsserie utvecklades och installerades nya förbättrade elektroniska system för bland annat:
- kontrollsystemen för ångcykeln
- kontrollsystemet för ångpannorna
- säkerhetssystemet för ångpannorna
- kontrollsystemet för ångpannornas brännare
- ångpannornas flamvakter
Dessutom installerades första generationens
- Dockningslogg
- Antikollisionsradar
- Maritex
Två år senare utveckades och installerades det första maskinalarmsystemet med textskärm, antagligen det första som installerats i ett handelsfartyg. Videodisplayer var på den tiden inte tillräckligt tillförlitliga och fans ju dessutom endast i svart/vitt. För ändamålet använde vi därför en något speciell skärm från Burroughs som presenterade lysande orangeröd text. En skärm som vi för övrigt börjat använda för vissa navigeringsfunktioner. Denna hade utvecklats för att testas i New York-polisens mest avancerade polisbilar.
Text: Leif Johansson, f d Senior Project Engineer vid Salénrederierna